UAV Networks
Unmanned Aerial Vehicles (UAVs) or drones (as they are commonly reffered to) are complex aerial
wireless sensing and actuation platforms. The use of UAVs, especially quadrotors, has permeated to all aspects of human life.
UAVs may effectively be used as a spatial tool in examining urban areas, including buildings,
infrastructure, ecosystem features and processes, natural areas, and environmental health.
Challenges, such as -- bad weather conditions, limited or absence of network
connectivity, limited visual range, spread of the search zone, absence of GPS
signal and other similar problems, are complex and detrimental to the use of
UAVs, especially UAV swarms, in search and tracking tasks. Intelligent and dynamic automation of UAVs over networks
allows for robust coordination among UAVs in a UAV network and enables solutions such as flying to specific
search zones or locations, autonomously choosing appropriate UAV
combinations to sense and track provided mission objectives (objectives may be
tracking a plume of smoke, tracking radioactive leaks, tracking humans, and
others). Intelligent automation in UAVs enables for a highly coordinated network of UAVs or UAV swarms, which can enable
schemes for compensating against environmental effects to optimize tracking
and minimizing the time and energy required to complete a mission.
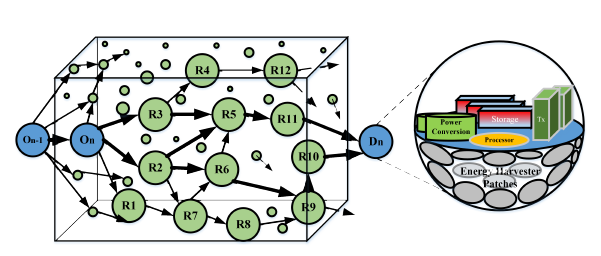
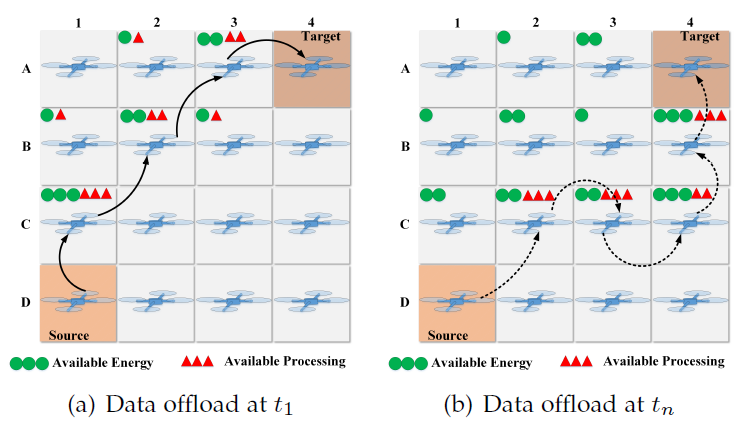
The minimization of time and energy can be addressed through optimizing the
processing and analysis of data gathered from the individual drones/UAVs. The
processing may be performed collaboratively within the swarm, or offloaded to
a remote server. Since, there is a severe bandwidth restriction in aerial scenarios, especially if the UAV network is decentralized with no
dependencies to ground-based infrastructure, there is a need for strategies to enable complex control of UAVs over networks, reducing UAV data load
on the networks, deciding when and how to offload, selecting appropriate offload loactions, and many others.
In our works, we take various approaches to address the following:
- A futuristic replacement for UAV Networks
- Optimizing Network and UAV parameters through the use of AI/ML
- Optimizing Offloading in UAV Networks
- Enhancing Agricultural Practices through UAV Networks
- Enabling Networked Control and Scalability of UAVs
- Enhancing TArget Tracking Efficiency in UAV Networks
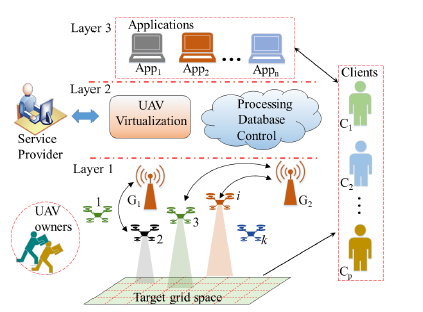
- Virtualizing UAVs for Efficienct Resource Reuse and Reallocation
- Security in UAV Networks