The proliferation of Cyber-Physical Systems (CPS) has been a matter of increased convenience in modern safety critical systems engineering. The underlying architecture of most CPS implementations is essentially a Networked Control System (NCS) with complex software implementations for signal processing, on-board prognostics, health-monitoring and other related performance, safety and intelligence features. The backbone of a Networked Control System has been the wired media for a major part of last decades. Slowly but steadily, the spread of control networks over wider areas and advancement in wireless networking hardware and signal processing techniques has attracted attention for its use in industrial and non-industrial applications. A WNCS is a distributed system of sensor nodes and actuator nodes that are interconnected over wireless links. Sensors gather information about the physical world, e.g., the environment or physical systems, and transmit the collected data to controllers/actuators through single-hop or multi-hop communications. Enabling control over multi-hop wireless networks creates the so-called multi-hop control networks that are representative of wireless networked control systems. The control and feedback signals are exchanged in the form of information packets over a shared wireless medium, thereby closing a global control loop. Multi-hop network based control of physical systems is becoming increasingly common in the modern world owing to the ability of low-cost sensing, fast transfer of data and low-power implementation of control commands. Several modern applications like robotic swarm co-ordination and motion control which would earlier be limited in range and functionality due to hardware and networking limitations in terms of computation and communication are now possible in this new era of edge devices with computing and transmit capabilities.
However, such an ambition for fast monitoring and control in a WNCS requires support for wireless communication infrastructure with reliability and timing guarantee so that necessary real-time properties of the system are maintained. Such properties, like the minimum required rate of control actuation in terms of packet delivery sequence are key to the safety, performance and stability of such systems.
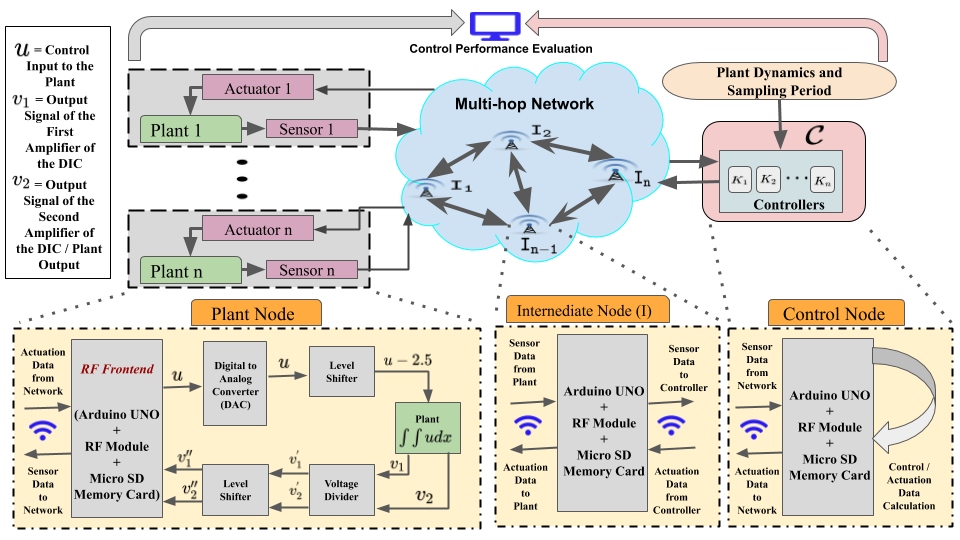
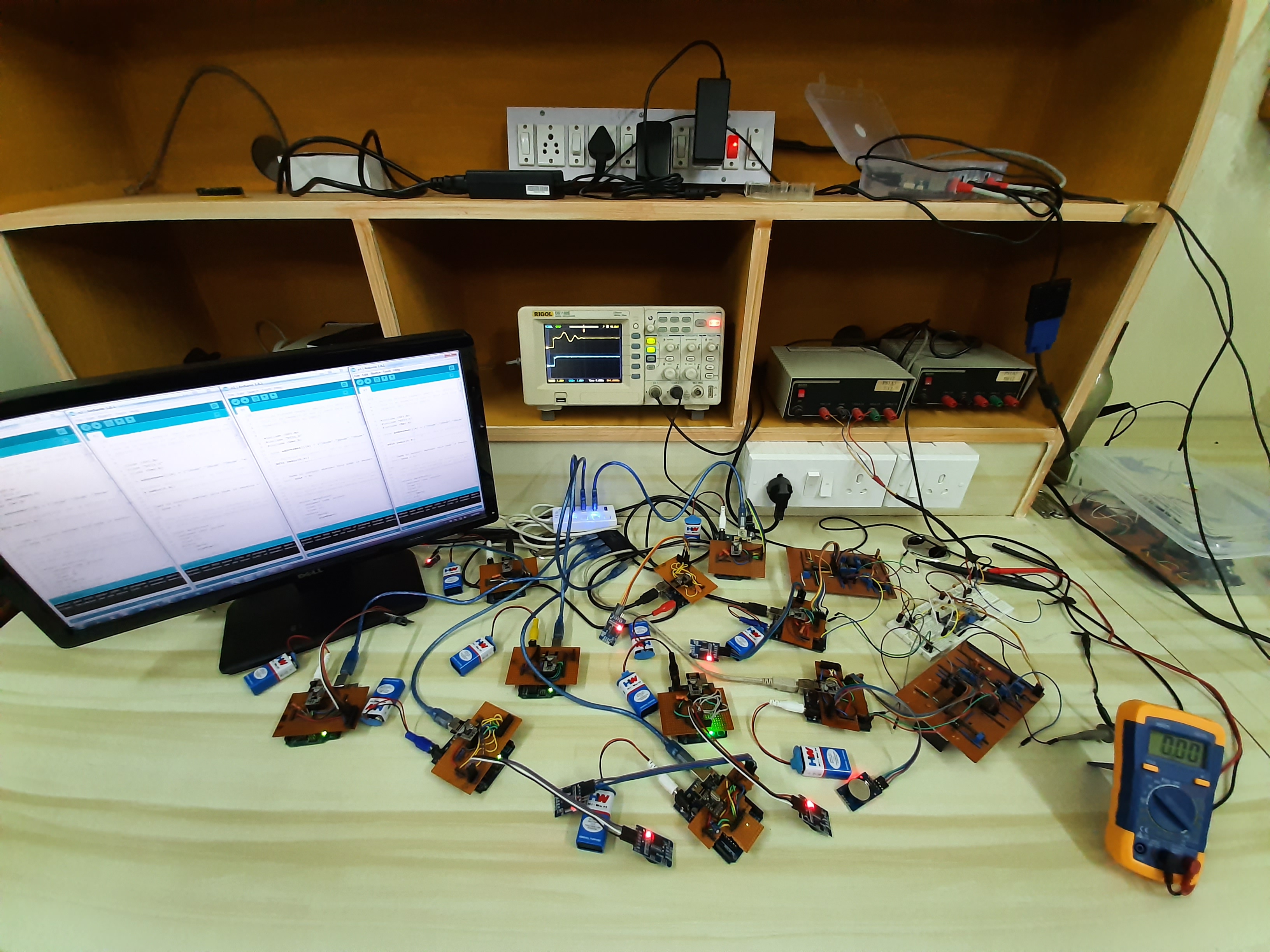
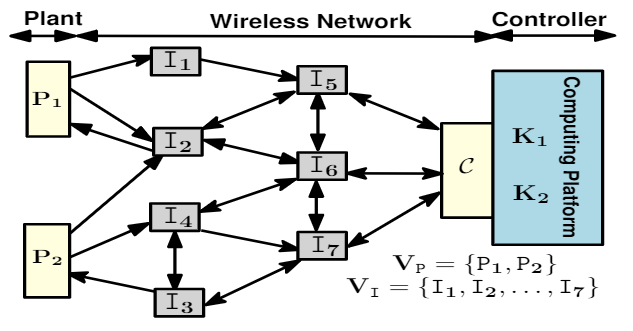
With these in consideration, We, a team of research scholars along with grad students from various disciplines, do research on related existing issues involving quality of service (QoS), reliability and delay of control-packet transmission for achieving the optimal control performance in WNCS. We also work on hierarchical control architectures for adaptively regulating the communication schedule of a multi-hop control network. To validate our ideas of adaptive real-time network scheduling and platform parameter tuning, we have implemented a novel programmable hardware-software co-designed testbed for the same.
Realizing closed-loop control over multi-hop wireless networks becomes particularly challenging with state-of-the-art wireless technologies (e.g. WirelessHART, ZigBee and ISA100.11a) due to the limitations in meeting the stringent communication requirements of closed-loop control applications. In Centralized Multi-hop Scheduling, the controller is responsible for schedule construction, and it has the global knowledge of network topology. But, owing to the overhead of obtaining topological information and the cost of installing the schedule, the centralized approach is not scalable. Hence, Distributed Scheduling techniques are more attractive from a practical perspective.
Wireless multi-hop control networks (MCN) facilitate real-time monitoring and control for a significant class of distributed cyber-physical systems. While MCNs help in achieving wide-area coverage, such deployments need to guarantee stability and real-time performance in the presence of time-varying network delays in each hop. It is even more challenging to implement a fast feedback control when there is a large variation in the end-to-end network delay.