Research Topics
# Loop-skipping Pattern Synthesis Framework for CPS
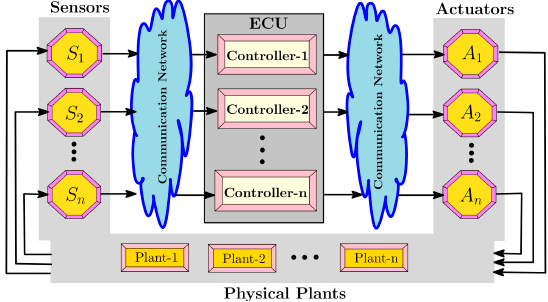
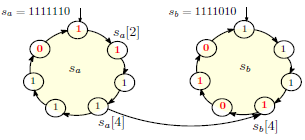
An adaptive scheduling framework for a set of control loops is developed by introducing the notion of loop execution patterns. A structured synthesis mechanism is proposed for generating such loop execution patterns under different input disturbance scenarios. The proposed synthesis methodology employs stable adaptive switching between loop execution patterns for improved quality of control and resource utilization while guaranteeing the schedulability of the loops. This unique framework post-processes static schedules of a set of control loops is developed such that, combined control performance can be improved further. The proposed method instruments each loop to switch between multiple controllers by co-operatively sharing their execution slots. We develop a fault tolerant framework for synthesizing the specifications of a set of loop execution patterns, that are robust enough to guarantee the desired control performance under platform non-idealities. The synthesis process is developed leveraging the concept of bounded model checking for generating such robust specifications.
# Co-design of Fault Tolerent Networked CPS
A co-design framework to synthesize a co-schedulable combination of loop execution patterns for a set of control loops over a shared wireless multi-hop control network, along with their associated routing solution is developed such that, overall control performance gets optimized. The proposed framework is also shown to be useful for evaluating the fault tolerance of a resource-constrained shared network subject to communication link failures. More about this on Wireless Multihop Control Design page.