|
I am a final year dual-degree (5-year integrated bachelor's and master's program) student in the Department of Computer Science and Engineering at IIT Kharagpur. I am fortunate to have been advised by Prof. Partha Pratim Chakrabarti and Prof. Aritra Hazra for my bachelor's and master's thesis. I am interested in developing agents that can reason in the real world. I want to develop models that can do visual reasoning, in addition to the current tasks that they are good at. Presently, I am working on using attention to improve self-supervised learning models. I have done research internships at UBC, Vancouver and the University of Sydney. I worked on large scale pattern matching and facial landmarks detection, respectively, in these internships. I have also interned at Goldman Sachs in Summer 2020. I like to explain the things I read, clearly, through my blog posts and/or through visualizations. |

|
|
|
|
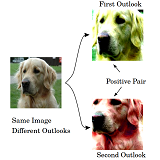
Aug, 2020 The SimCLR framework requires large batch-sizes to form a good representation space, because the negative pairs are generated in the same batch. Momentum Contrast V2 combines SimCLR's design improvements with the original MoCo framework to do self-supervised learning with less computational costs. |
|
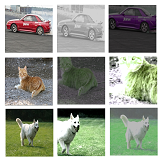
Apr, 2020 SimCLR is a simple framework for contrastive learning of visual representations. It showed that composition of data augmentations like color jittering and random crop play a critical role in learning good visual representations. |

|
Mar, 2020 The GNU Toolchain is a set of programming tools in Linux systems that programmers can use to make and compile their code to produce a program or a library. This post explains this toolchain that contains GNU m4, GNU Make, GNU Bison, GCC, GNU Binutils, GNU Debugger and the GNU build system. |
|
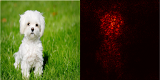
Jan, 2020 This post discusses a simple gradient approach ( by Simonyan et. al) to obtain saliency maps for a trained neural network in PyTorch. |
|
Jan, 2020 This post solves the racetrack problem in reinforcement learning in a detailed step-by-step manner. It starts with constructing the racetrack environment in Pygame and then proceeds with solving this problem with the off-policy Monte Carlo control algorithm. |
|
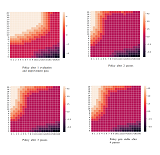
Oct, 2019 This post explains the policy iteration algorithm in Reinforcement Learning and uses it to solve Jack’s car rental problem given in the Sutton & Barto book. |
|
|
|
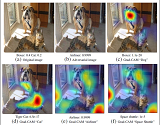
Image Source: Grad-CAM paper by Selvaraju et. al Nov, 2020 This video talks about visual saliency techniques, starting from a simple gradient based approach, to discussing a bit about Guided Backpropagation, to finally discussing GradCAM. It talks about the qualities of a good visual explanation and how GradCAM produces these explanations. |

|
Arxiv link to the NBDT paper by Wan et. al Jan, 2021 I explain the paper "Neural-Backed Decision Trees (NBDT)" in this video. NBDTs are essentially hybrid architectures involving a neural network backbone with a decision tree head. I start by explaining what does it mean to have interpretable models, and why do we need them. The main reason why I like this paper is that it attempts to break the dichotomy between accuracy and interpretability. |
|
|
Artificial Intelligence |

|
This is a simulation in which the goal of the rockets is to reach the yellow circle while avoiding the obstacles and the borders along their path. This page shows how a genetic algorithm solves this path planning problem. |

|
This page is an implementation of the Expectation-Maximization (EM) algorithm from scratch. It fits mixture gaussian density to the points provided on the screen. |
|
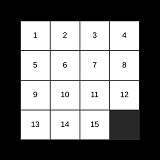
This is the classic 15 puzzle problem. I became quite interested in solving it in as less number of steps as I could. The goal is to place the tiles in order, by making moves that use the empty space. I find it quite interesting how we humans can find good heuristic functions based on both logic and intuition to navigate in the state space to arrive at the goal state and that too with constrained memory. |
Particle Systems |

|
Diffusion of particles simulated by a random 2D walk. You can click on the screen to create a bunch of particles. |

|
In this system, same colored particles repel and different colors attract each other. One can click on the screen to create a bunch of particles. One can also change attraction and repulsion constants to change the magnitude of corresponding forces. The forces follow the inverse square law. |
Games |

|
Just like flappy bird, the goal is to swim between columns of pipes without hitting them. The spacebar can be used to control the fish. |

|
You need to save your block from the other falling blocks in this game. Increase your score and climb up the levels. The falling blocks follow Poisson distribution to ensure that the occurrence of one falling event does not affect the probability that a second falling event will occur. The expectation of this distribution increases as the game progresses. |
Other |
|
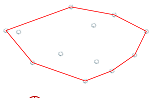
An implementation of the Gift Wrapping algorithm for convex hull. |

|
Perlin noise is a type of gradient noise used by visual effects artists to increase the appearance of realism in computer graphics. This page uses a 2D perlin noise distribution to create a force field in which a thousand particles are dropped on the screen and their locus is displayed to create beautiful designs. |
|
Design courtesy of Jon Barron. |